












搜索

作品简介: 机械扩大的桩尖与两次扩大头管桩的施工方法,先对桩尖进行机械旋转扩大;再在机械旋转扩大的桩端下部使用高压旋喷注浆技术,形成预制管桩底端两次扩大头,从而较大幅度地提高预制管桩单桩承载力。

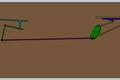
作品简介: 本作品以7自由度类人机械臂和多功能仿生螃蟹执行端为核心,采用atmega168单片机进行控制,运用人体工程学手柄和高清摄像头相结合的操作平台进行操作,实现了7自由度机械手的平稳运行,仿生执行端准确的定位,远距离实时交互的完成剪断,扩张,夹取等动作。

作品简介: 肢体残疾对人们的生活造成很大的困扰,本残疾人人体机械仿真手具有极高的人体仿真程度,能够拿捏不同体积,易碎的物品,能够稳定、牢固的保持物品,同时具有其他如写字、烹饪等人体高仿真的功能。同时在使用时,使肘关节运动不受到束缚,最大的发挥肘关节的施力效果,有良好的应用前途。

作品简介: 针对教学仪器设备市场实际需求,我们运用先进的模块化设计,使产品成为换代升级容易的组装式智能教学机械手,使其成为老师教学和学生实践体验的有力工具,且本产品使用简便、功能丰富、可靠性高。创新亮点:模块化设计、开放式结构;学习型自动编辑程序;采用嵌入式模糊PID控制技术,位置控制快速而准确。复杂技术简单化,各电子元器件的选用和调试等复杂的技术操作部分有机整合。

作品简介: 大蒜是我国重要的经济作物,已连续多年居我国农产品出口第一位。长久以来大蒜播种完全依赖于人工播种,在研播种机无法解决蒜种正立问题且种子堵塞、损伤问题严重,均未得到推广使用,我国迫切需要研究和开发大蒜播种机械。本研究主要运用单片机自动控制系统和机械臂,有效的保证大蒜种子朝向提高发芽率,保证大蒜的蒜形和产量 ,实现大蒜播种的自动化,对提高劳动生产率、降低劳动强度、增加农民收入具有重要意义。

作品简介: 本作品依据工程机械检测的维修现状,提出了新的检测手段。本课题与安徽现松工程机械服务有限公司合作,对工程机械关键设备进行状态检测与故障诊断,避免故障的发生,减少非计划停机,确保完好率,最大限度地提高使用工程机械的施工企业获得最高的综合效益。

作品简介: 介绍近几年中国塑料机械发展现状,分析目前国内和国际市场形势,预测今后5~10年中国塑料机械发展目标。

作品简介: 这是一个生活中的小洁具,安装在水龙头旁边。 他的作用就是早晨刷牙时,将水杯接水过程和挤牙膏的过程集中在这个小洁具里,能量来源于自来水管内的压力。
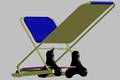
作品简介: 据调查,市面上普通轮椅可以帮助行动不便在平坦路面上前行,然而遇到楼梯等障碍物却素手无策,往往需要担架等物品辅助,极其不便。针对此问题,我们精心设计了此款多功能轮椅,其制作成本低,占地面积小,操作简单方便,不仅能够帮助行动不便人士在平坦路面上前行,更能便捷的上、下楼梯,是行动不便人士的必备工具。 我们的设计理念——设计一款让所有行动不便人士都买得起,用得满意放心的多功能轮椅。
作品简介: 本设备通过简单的电路和机械控制,实现了自动化装卸锻件,使轴承套圈的生产效率提高了一倍以上,且减少了废品率,并有效地降低了工人的劳动强度和危险性,节省人工,能极大地提高企业的经济效益。

作品简介: 该机械双控节水器是通过脚踩来控制出水。当用水时,脚下踩踏板即可出水。当不用水时,将脚离开踏板,水流自动停止。当需要长时间放水时,则可在踩下踏板的同时打开控制开关,则脚踏板不会复位,可以长时间放水而不需要人看管。
作品简介: 本设计基于在校大学生实际生活的需要以及现在节能环保的理念,通过发现大学生生活中的小细节,小问题,设计了一套适于大学生使用,集健身与劳作于一身的方案。

作品简介: 本设计是一种辅助取物用简易机械手,主要用于拾取放置于高处或角落等不易触及地方的物品,同时也可为一些弯腰、行动比较困难的老年人拾取物品提供方便。同时本设计还增加了拐杖和照明功能,能更好地为使用者提供方便。
作品简介: 通过对冰面上发生事故特点的探究,发现冰面上发生事故的问题很大,而且不易解决,所以提出这种新的冰面救生装置的设计方案。它结构组成:冰面移动装置、水面移动装置、重心转移装置、弹射装置、遥控装置。装置完全通过遥控,解决了设施救援区域小以及救援人员易发生危险等问题。冰面移动装置在冰面上通过履带滚动在冰面上行走,水面移动装置在水面上通过螺旋桨转动移动,弹射装置会携带自动充气救生圈。

作品简介: 机械臂自动寻物救援车是为了实现在高污染和 严重威胁人身安全的情况下对工厂或特定区域进行物品的收集以及对周围事物的实时监视而设计的。它通过红外接近传感器和红外测距传感器感知周围物体,通过使用先进的CDS5500 机器人伺服舵机和功能齐全的MultiFLEX主控器,实现手臂的自动夹物和放物。同时,对于不同的工作环境,可以快速地搭建出合适的手臂构造,编译出相应的程序,完成需要的任务,可操作性强。

作品简介: 本地震灾害救援手套由远节指结构、中节指结构、近节指结构和皮质材料组成。 主要创新点: 在手套近节指关节处添加了连杆滑道机构,以此来实现机械手套的自动锁死功能,使手套手指能自动保持弯曲状态,在提高救援人员的工作效率的同时也达到了节省救援人员体力及保护救援人员双手的目的;当工作完成后或临时需要手指伸直时,救援人员只需要在此基础上稍加弯曲,即可实现手套由锁死功能到解锁的转变,手指自由伸直。
作品简介: 在广大同学的生活当中大家都可以感到立式便池是自动冲便的而蹲式便池却缺少了这了自动冲便的功能。蹲式便池冲便即便是脚踩一下或手摁一下那样举手之劳的方便也会出现了忘记冲便或不冲便的现象。因此激发了我设计该作品的灵感,希望能使我们生活更加的方便。 该作品是通过变形棘轮在棘爪作用下使竖直的微小位移自动的转化成水平位移构成自动冲便的机械装置。
作品简介: 机械零件可能存在多种失效模式,且各个失效模式往往不相互独立。各个相关失效模式的极限状态函数一般没有统一的联合概率密度函数,因此相关失效模式下的可靠度计算非常困难。假设机械零部件同时发生三种或更多种失效模式的事件为极小概率事件,用线性回归法得到不同失效模式下极限状态函数之间关系,建立相关失效模式下可靠度的二重积分模型。若极限状态函数间呈现平方、立方、指数函数等关系时,可以先经过线性变换后应用该模型。

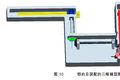
作品简介: 本设计是一种模切机的自动上下料机械手,属于气动机器人范畴。该机械手以PLC控制为核心,设置了一种基于负压原理工作的装置,具体地说是主要运用气缸的工作来实现纸板上下料功能的机器。本机械手主要利用气压工作原理,以空气作为工作介质,让气缸驱动吸盘。该装置环保,低成本,能耗低,性能好,自动化程度高,可使人从低级的、重复性劳动中解脱出来,更能代替人力在危险的环境中工作。
作品简介: 在我们现实生活中锁具大多数都是机械锁为主,传统的机械锁由于其构造的简单,不能满足一些特定情况下的需求。本文运用较常规的机械部件,设计精巧,自锁性能高,能够满足市场的基本需求。对机构的运动分析,本文采用ADAMS联合仿真软件进行仿真分析,清晰明了,有效地演示的机械部分的原理。
