












搜索

作品简介: 利用附着在人体上的机械来辅助体弱者及中老年人运动的。利用高压气瓶内的压缩空气驱动机械外骨骼和用采集人体表面肌电信号(SEMG)的方式控制机械外骨骼的运动。创新之一是使用了更先进的空气驱动部件——气动肌腱和直接使用可重复使用的高压气瓶。能源利用率高,可以获得更经济的使用时间。同时我们对机械外骨骼的一个关键结构作出了比较重大的创新,较同类机械外骨上的结构可以更好的支持穿戴者的运动。

作品简介: 本次课题研究在原三平动Delta机器人两条RSS运动链主动臂在一个平面内并联的基础上,增加一条RSS支链以限制多余自由度,最终产生两平动且可实现整周回转的并联机器人新构型。采用“PC+NI运动控制卡”控制模式,基于LabVIEW编程平台开发出高效、稳定的控制系统虚拟仪器。本作品可以顺利完成高速、多工位抓放动作,实验测得的精度、工作范围、速度、负载能力等多项性能指标均达到国际先进水平。
作品简介: 作品设计的目的:为了服务工厂、车间等工作场所,实现对物品的抓取、提升、移动、放置等功能
作品简介: 本设计的目的在于实现一种简单、实用、可靠,下降速度稳定、造价较低的救生装置。我们研究的高楼逃生器定位于家庭用户,目标是使各高层住户每家拥有一套,从社会效益和经济效益上取得大的收获。 本高楼逃生器使用摩擦片造成摩擦力来控制缆绳轮转动速度,以此作为逃生器缓降的阻尼系统主要结构,帮助逃生人员从高处平稳下降、安全地到达地面。
作品简介: 众所周知,我国是一个淡水资源紧缺的国家。而在日常生活中往往会出现这样的现象:当停水时,常常会有人拧开水龙头后忘记关闭,水流到楼下居民家中造成不必要的损失。这些问题已经在一些高档的阀门中得以解决。这些阀门利用传感器通过电路控制自动出水。但这些阀门需要外接电源,成本较高,体积较大,不能很好的应用于每个家庭。本设计的目的是设计一个机械式轻便、灵巧、便宜的自动节水阀门。

作品简介: 通过在ARM9上移植bootloader、嵌入式linux操作系统、文件系统、应用程序等,对基于嵌入式的机械设备远程故障诊断通信系统的硬件组成,软件功能及工作过程进行了研究,从而开发出一套完整的故障诊断车载终端系统。并在此基础上,对远程机械故障诊断通信系统的安全性,实时性和传输效率做了进一步的探讨。

作品简介: 这是一套能够连接现代农场和广大网民的新型交互系统,并且以当下流行的“开心农场”等网络农场的形式表现出来。我们将调动网友的游戏热情和巨大潜在消费力构件真实版的“开心农场”。使网友能够利用一个客户端便可以在家中经营自己在远端的小农场,并可以操纵一个机械臂对自己的农场进行照料。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。

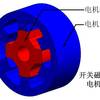
作品简介: 该机器人针对核泄露事故代替救援人员进入现场实施救援工作。 该机器人采用履带式结构,具备三关节六自由度机械手臂。配备有核探测仪,可以得到核污染区辐射分布情况,也可以利用其机械手臂处理核污染废物。
作品简介: 我们制备了生物相容性好的壳聚糖/石墨烯复合材料,并通过一系列实验来研究该材料的机械性能和生物相容性,证明了这种复合材料可以作为生物医学工程支架材料。
