












搜索

作品简介: 利用附着在人体上的机械来辅助体弱者及中老年人运动的。利用高压气瓶内的压缩空气驱动机械外骨骼和用采集人体表面肌电信号(SEMG)的方式控制机械外骨骼的运动。创新之一是使用了更先进的空气驱动部件——气动肌腱和直接使用可重复使用的高压气瓶。能源利用率高,可以获得更经济的使用时间。同时我们对机械外骨骼的一个关键结构作出了比较重大的创新,较同类机械外骨上的结构可以更好的支持穿戴者的运动。

作品简介: 本次课题研究在原三平动Delta机器人两条RSS运动链主动臂在一个平面内并联的基础上,增加一条RSS支链以限制多余自由度,最终产生两平动且可实现整周回转的并联机器人新构型。采用“PC+NI运动控制卡”控制模式,基于LabVIEW编程平台开发出高效、稳定的控制系统虚拟仪器。本作品可以顺利完成高速、多工位抓放动作,实验测得的精度、工作范围、速度、负载能力等多项性能指标均达到国际先进水平。
作品简介: 作品设计的目的:为了服务工厂、车间等工作场所,实现对物品的抓取、提升、移动、放置等功能
作品简介: 本设计的目的在于实现一种简单、实用、可靠,下降速度稳定、造价较低的救生装置。我们研究的高楼逃生器定位于家庭用户,目标是使各高层住户每家拥有一套,从社会效益和经济效益上取得大的收获。 本高楼逃生器使用摩擦片造成摩擦力来控制缆绳轮转动速度,以此作为逃生器缓降的阻尼系统主要结构,帮助逃生人员从高处平稳下降、安全地到达地面。
作品简介: 众所周知,我国是一个淡水资源紧缺的国家。而在日常生活中往往会出现这样的现象:当停水时,常常会有人拧开水龙头后忘记关闭,水流到楼下居民家中造成不必要的损失。这些问题已经在一些高档的阀门中得以解决。这些阀门利用传感器通过电路控制自动出水。但这些阀门需要外接电源,成本较高,体积较大,不能很好的应用于每个家庭。本设计的目的是设计一个机械式轻便、灵巧、便宜的自动节水阀门。

作品简介: 通过在ARM9上移植bootloader、嵌入式linux操作系统、文件系统、应用程序等,对基于嵌入式的机械设备远程故障诊断通信系统的硬件组成,软件功能及工作过程进行了研究,从而开发出一套完整的故障诊断车载终端系统。并在此基础上,对远程机械故障诊断通信系统的安全性,实时性和传输效率做了进一步的探讨。

作品简介: 本作品抛弃了传统的操纵杆、键盘等人工控制方式,提出一种全新的控制理念,也就是用人的手臂和手部动作的变化来实现对可移动的多自由度机械手的无线控制,使操作简单、直观,并适用于一定复杂环境;另外,本作品还装配了用于监控的无线摄像头,进一步扩大了本作品的适用范围,与此同时,本作品增加了目标自动定位功能,实现了一定的智能化,进一步提高了工作效率,达到了一定程度的人工与智能相结合。 本作品验证了用...

作品简介: 日常生活中难免会有停水的事件发生,普通水阀不能断水自闭,可能会导致停水后恢复来水时,发生水流不止的现象,这种现象严重时可能会危及人身财产安全。为了从技术上解决上述问题,有必要设计一种新型水龙头。该产品的设计将在节约淡水资源方面作出应有的贡献,尤其在我国淡水资源紧缺的现实状况下更加显得有意义,同时亦可消除许多安全隐患。适合在居民家里等环境下使用。同其它具备停水自闭的水阀相比,该产品材料简单,...

作品简介: 本系统能够在蠕铁铸件生产之前,对蠕化率、强度、碳、硅等参数进行快速在线检测,从而保证铸件在浇注前材质达到蠕墨铸铁生产要求。
作品简介: 利用分岔图、相图、Poincaré截面分析了受外部扰动的离心调速器系统的混沌形成过程,通过计算动力学方程时间序列的Lynapunov指数谱和Poincaré截面,揭示了此类系统是由Hopf分岔通向混沌的道路。运用耦合反馈同步控制方法与自适应同步控制方法实现混沌同步,并给出实现同步的条件及控制律参数的选取范围,同时运用数值仿真证实同步控制方法的有效性,它们在工程实际领域中具有广泛的应用前景。。

作品简介: 纺织行业使用的电机特别多,因其工作性质的原因,机器启动后是不宜停机的。本变频器专门适用于纺织机械的电机上,由于电网有电压波动,由变频器自动调节电动机的输入电压,使其达到最优的工作状态,以达到节能的目的。
作品简介: 井下救生机械手适用于各类坠井事件的井下无人救助,尤其是口径小、深度大、空气稀薄,救援人员不便或无法进入施救的情况。该装置由蛇形机械手、机械手联动装置、前端信息反馈装置、单向可折叠式探杆、井上收放及平动装置、监视控制终端等部分组成。其主要工作过程是根据前端信息反馈,控制蛇形机械手带动救生绳寻隙而行地环绕被困者一周,完成救生绳索安全搭扣后,启动井上收放装置提升被救者,实现救助。

作品简介: 这是一套能够连接现代农场和广大网民的新型交互系统,并且以当下流行的“开心农场”等网络农场的形式表现出来。我们将调动网友的游戏热情和巨大潜在消费力构件真实版的“开心农场”。使网友能够利用一个客户端便可以在家中经营自己在远端的小农场,并可以操纵一个机械臂对自己的农场进行照料。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。

作品简介: 该机器人针对核泄露事故代替救援人员进入现场实施救援工作。 该机器人采用履带式结构,具备三关节六自由度机械手臂。配备有核探测仪,可以得到核污染区辐射分布情况,也可以利用其机械手臂处理核污染废物。
作品简介: 我们制备了生物相容性好的壳聚糖/石墨烯复合材料,并通过一系列实验来研究该材料的机械性能和生物相容性,证明了这种复合材料可以作为生物医学工程支架材料。
作品简介: 我们制备了生物相容性好的壳聚糖/石墨烯复合材料,并通过一系列实验来研究该材料的机械性能和生物相容性,证明了这种复合材料可以作为生物医学工程支架材料。
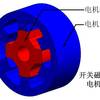
作品简介: 本项目研究的目标就是实现陀螺仪的产品化、生产化。本项目采用的陀螺仪相比于传统的陀螺仪有显著的优势和特点,传统的陀螺仪多采用静电驱动电容检测,电容式的陀螺仪缺点是显而易见的,如驱动力小、检测电路复杂、衬底必须可导电等。而本项目所设计的陀螺仪完全把这些缺点转化成了优点,而且首次实现了电子器件RTD和陀螺仪的结合,为制作高灵敏度陀螺仪开创了先河和指引方向,也为现实我国自主开发研制可实用性陀螺仪打下基础。

作品简介: 基于XS128单片机的智能车控制系统,能够实现小车的自主行驶,主控芯片通过产生PWM波形控制舵机和电机,由光电编码器和加速度传感器进行数据反馈,并创新性的增加旋转摄像头和辅助转向的制动装置。以提高图像信息的采集宽度。

作品简介: 多功能机械手采用机电传动机构使机械手往复闭合。机械手夹持迅速,灵活多变,携带运输方便。通过简单机电传动进行一系列人本身不能实现送给物品的过程。在各种突发灾难或危险事故发生时,人不能接近的危险区域或人手够不到的地方,能够代替人手及时为遇难者递送物品或抢救重要物资。该产品具有成本低,加工容易,携带方便,操作灵活等特点,并有广阔市场前景。本品适合大批量生产。
