












搜索

作品简介: 自行设计和制作人体关节活动传感器附在人的手臂上,从而达到控制龙人机械臂,完成各个关节的基本活动,完成抓取目标的任务。

作品简介: 开放的写字灵巧手主要用于教学领域,解决学生用教学机械手类实验仪器的结构庞大,可实现的自由度低,动作功能单一,价格昂贵,实际控制复杂,可实现的实验项目稀少和不利于开展科创研究学习等问题,填补了教学领域机械手拥有高灵敏度、高精确度自动闭环控制回路的空白。

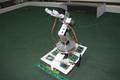
作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 利用超音速火焰喷涂得到的WC涂层具有优良的耐磨性,已被广泛应用于航空航天领域。但是目前国内使用的WC-Co喷涂粉末基本都是进口粉末,维修成本非常高。现在国内已经能够自主生产WC-Co粉末,但其作为新研材料,必须经过测试,而国内对此研究较少。本文研究了该粉末的显微组织、空隙率、结合强度等性能,对国产WC-Co粉末的推广应用,降低飞机维修成本具有重要的意义。

作品简介: 机械装备通常投入运行后才可以实际操作。使用实物、模型、视频、PPT讲解等培训方式都难以进行操控培训。 本作品中建立了机械装备仿真运行环境,通过仿真操作面板,实现了虚拟样机的可操控性、现场运行仿真性和机械装备内部可见性,针对机械装备结构、操作、安全、维护等各方面内容进行培训指导,解决了企业岗前培训、生产培训等方面的困难,其核心技术已应用于隧道股份公司的盾构机虚拟培训系统中,达到预期效果。

作品简介: 伴随食品、医药、电子等轻工业的快速发展,对于后包装生产线的机械自动化及卫生安全等方面提出越来越高的要求。本项目结合实际需求,通过分析工作时所需抓放动作,创新设计出能够实现空间三个方向平动和一个转动自由度的3T1R四自由度高速并联机械手,以便实现空间移位和摆放在一道工序内实现。经分析预测,该机械手可以达到10-15g的加速度,实现抓取次数达100-120次/min。

作品简介: 本作品依据机械设计、流体力学等知识,综合仿生学,设计制造一种仿鱼机器人,模仿鲤鱼的游动;在游动成功的基础上,给机器鱼加装摄像头和复杂控制系统以及无线传输模块等,实现机械鱼的自主游动、遥控游动和水下监测等功能。后期还可根据不同任务的需要更换或继续加装其他设备。

作品简介: 履带式排爆机械人主要由底座和手臂组成; 底座:用铝合金作为支架连接双排可折叠式履带,由两大齿轮加三小齿轮带动,通过齿轮和履带间的传动驱使机械人移动,用履带代替传统的轮传动;履带前端的接近角可以达到60度,加上履带的优势,所以具有很强的攀爬能力。 手臂:由前、中、后三部分构成,前臂仿液压式的螺旋传动,可达到360度旋转,中臂和后臂之间旋转角90--180度;手臂总长约160cm,安装在底座上

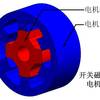
作品简介: 本机械手模型采用混合驱动,综合电机传动精度高及气压传动快的优势。六关节机械体可完成机身回转、手臂伸缩和俯仰、手腕升降和旋转5个自由度,以不同位姿实现对目标物体的抓取。基于激光调制技术的寻迹系统可搜寻、定位目标物体及距离检测。本机械手可实现各关节的点动,定点间单/双层物体和横/斜位姿物体的搬运、高低位置放置、单次/循环激光定位等自动控制,利用自行开发的监控软件进行数据采集、实时动画模拟等。
作品简介: 本设计分别制作了控制机械臂和建立在智能车平台上的仿生机械臂。控制机械臂与智能车间使用无线通信。通过无线控制的方式来操控机械臂的动作、实现机械臂的运动。

作品简介: 利用附着在人体上的机械来辅助体弱者及中老年人运动的。利用高压气瓶内的压缩空气驱动机械外骨骼和用采集人体表面肌电信号(SEMG)的方式控制机械外骨骼的运动。创新之一是使用了更先进的空气驱动部件——气动肌腱和直接使用可重复使用的高压气瓶。能源利用率高,可以获得更经济的使用时间。同时我们对机械外骨骼的一个关键结构作出了比较重大的创新,较同类机械外骨上的结构可以更好的支持穿戴者的运动。
作品简介: 本次课题研究在原三平动Delta机器人两条RSS运动链主动臂在一个平面内并联的基础上,增加一条RSS支链以限制多余自由度,最终产生两平动且可实现整周回转的并联机器人新构型。采用“PC+NI运动控制卡”控制模式,基于LabVIEW编程平台开发出高效、稳定的控制系统虚拟仪器。本作品可以顺利完成高速、多工位抓放动作,实验测得的精度、工作范围、速度、负载能力等多项性能指标均达到国际先进水平。
作品简介: 作品设计的目的:为了服务工厂、车间等工作场所,实现对物品的抓取、提升、移动、放置等功能
作品简介: 本设计的目的在于实现一种简单、实用、可靠,下降速度稳定、造价较低的救生装置。我们研究的高楼逃生器定位于家庭用户,目标是使各高层住户每家拥有一套,从社会效益和经济效益上取得大的收获。 本高楼逃生器使用摩擦片造成摩擦力来控制缆绳轮转动速度,以此作为逃生器缓降的阻尼系统主要结构,帮助逃生人员从高处平稳下降、安全地到达地面。
作品简介: 众所周知,我国是一个淡水资源紧缺的国家。而在日常生活中往往会出现这样的现象:当停水时,常常会有人拧开水龙头后忘记关闭,水流到楼下居民家中造成不必要的损失。这些问题已经在一些高档的阀门中得以解决。这些阀门利用传感器通过电路控制自动出水。但这些阀门需要外接电源,成本较高,体积较大,不能很好的应用于每个家庭。本设计的目的是设计一个机械式轻便、灵巧、便宜的自动节水阀门。

作品简介: 本作品抛弃了传统的操纵杆、键盘等人工控制方式,提出一种全新的控制理念,也就是用人的手臂和手部动作的变化来实现对可移动的多自由度机械手的无线控制,使操作简单、直观,并适用于一定复杂环境;另外,本作品还装配了用于监控的无线摄像头,进一步扩大了本作品的适用范围,与此同时,本作品增加了目标自动定位功能,实现了一定的智能化,进一步提高了工作效率,达到了一定程度的人工与智能相结合。 本作品验证了用...

作品简介: 日常生活中难免会有停水的事件发生,普通水阀不能断水自闭,可能会导致停水后恢复来水时,发生水流不止的现象,这种现象严重时可能会危及人身财产安全。为了从技术上解决上述问题,有必要设计一种新型水龙头。该产品的设计将在节约淡水资源方面作出应有的贡献,尤其在我国淡水资源紧缺的现实状况下更加显得有意义,同时亦可消除许多安全隐患。适合在居民家里等环境下使用。同其它具备停水自闭的水阀相比,该产品材料简单,...

作品简介: 本系统能够在蠕铁铸件生产之前,对蠕化率、强度、碳、硅等参数进行快速在线检测,从而保证铸件在浇注前材质达到蠕墨铸铁生产要求。

作品简介: 纺织行业使用的电机特别多,因其工作性质的原因,机器启动后是不宜停机的。本变频器专门适用于纺织机械的电机上,由于电网有电压波动,由变频器自动调节电动机的输入电压,使其达到最优的工作状态,以达到节能的目的。
作品简介: 井下救生机械手适用于各类坠井事件的井下无人救助,尤其是口径小、深度大、空气稀薄,救援人员不便或无法进入施救的情况。该装置由蛇形机械手、机械手联动装置、前端信息反馈装置、单向可折叠式探杆、井上收放及平动装置、监视控制终端等部分组成。其主要工作过程是根据前端信息反馈,控制蛇形机械手带动救生绳寻隙而行地环绕被困者一周,完成救生绳索安全搭扣后,启动井上收放装置提升被救者,实现救助。
