












搜索
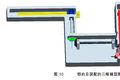
作品简介: 通过对冰面上发生事故特点的探究,发现冰面上发生事故的问题很大,而且不易解决,所以提出这种新的冰面救生装置的设计方案。它结构组成:冰面移动装置、水面移动装置、重心转移装置、弹射装置、遥控装置。装置完全通过遥控,解决了设施救援区域小以及救援人员易发生危险等问题。冰面移动装置在冰面上通过履带滚动在冰面上行走,水面移动装置在水面上通过螺旋桨转动移动,弹射装置会携带自动充气救生圈。

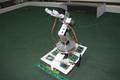
作品简介: 机械臂自动寻物救援车是为了实现在高污染和 严重威胁人身安全的情况下对工厂或特定区域进行物品的收集以及对周围事物的实时监视而设计的。它通过红外接近传感器和红外测距传感器感知周围物体,通过使用先进的CDS5500 机器人伺服舵机和功能齐全的MultiFLEX主控器,实现手臂的自动夹物和放物。同时,对于不同的工作环境,可以快速地搭建出合适的手臂构造,编译出相应的程序,完成需要的任务,可操作性强。

作品简介: 本地震灾害救援手套由远节指结构、中节指结构、近节指结构和皮质材料组成。 主要创新点: 在手套近节指关节处添加了连杆滑道机构,以此来实现机械手套的自动锁死功能,使手套手指能自动保持弯曲状态,在提高救援人员的工作效率的同时也达到了节省救援人员体力及保护救援人员双手的目的;当工作完成后或临时需要手指伸直时,救援人员只需要在此基础上稍加弯曲,即可实现手套由锁死功能到解锁的转变,手指自由伸直。
作品简介: 在广大同学的生活当中大家都可以感到立式便池是自动冲便的而蹲式便池却缺少了这了自动冲便的功能。蹲式便池冲便即便是脚踩一下或手摁一下那样举手之劳的方便也会出现了忘记冲便或不冲便的现象。因此激发了我设计该作品的灵感,希望能使我们生活更加的方便。 该作品是通过变形棘轮在棘爪作用下使竖直的微小位移自动的转化成水平位移构成自动冲便的机械装置。

作品简介: 机械零件可能存在多种失效模式,且各个失效模式往往不相互独立。各个相关失效模式的极限状态函数一般没有统一的联合概率密度函数,因此相关失效模式下的可靠度计算非常困难。假设机械零部件同时发生三种或更多种失效模式的事件为极小概率事件,用线性回归法得到不同失效模式下极限状态函数之间关系,建立相关失效模式下可靠度的二重积分模型。若极限状态函数间呈现平方、立方、指数函数等关系时,可以先经过线性变换后应用该模型。

作品简介: 本设计是一种模切机的自动上下料机械手,属于气动机器人范畴。该机械手以PLC控制为核心,设置了一种基于负压原理工作的装置,具体地说是主要运用气缸的工作来实现纸板上下料功能的机器。本机械手主要利用气压工作原理,以空气作为工作介质,让气缸驱动吸盘。该装置环保,低成本,能耗低,性能好,自动化程度高,可使人从低级的、重复性劳动中解脱出来,更能代替人力在危险的环境中工作。
作品简介: “创新是一种能创造新的增长和发展契机的东西。要寻求企业的持久优势,就要持续地进行技术开发活动,并从技术开发中的适应性改进逐步转向自主技术的创新,建立真正、独一无二的技术优势。”通过我们的调研感觉这就是阜新驰宇石油机械公司的发展历程。

作品简介: 本作品将应用三维CAD技术,完成多种机械传动机构,如双冲头机构、间歇运动机构、行星齿轮机构及多种工业产品,如自行车、启瓶器、绿化洒水车、金龙客车、液压汽车式起重机的三维建模、虚拟装配及运动仿真等内容。
作品简介: 在我们现实生活中锁具大多数都是机械锁为主,传统的机械锁由于其构造的简单,不能满足一些特定情况下的需求。本文运用较常规的机械部件,设计精巧,自锁性能高,能够满足市场的基本需求。对机构的运动分析,本文采用ADAMS联合仿真软件进行仿真分析,清晰明了,有效地演示的机械部分的原理。

作品简介: 自行设计和制作人体关节活动传感器附在人的手臂上,从而达到控制龙人机械臂,完成各个关节的基本活动,完成抓取目标的任务。

作品简介: 开放的写字灵巧手主要用于教学领域,解决学生用教学机械手类实验仪器的结构庞大,可实现的自由度低,动作功能单一,价格昂贵,实际控制复杂,可实现的实验项目稀少和不利于开展科创研究学习等问题,填补了教学领域机械手拥有高灵敏度、高精确度自动闭环控制回路的空白。
作品简介: 本作品对不同耕地规模水平稻农采用机械技术影响因素进行研究,有一定的理论价值和实际推广意义;作品选用的方法得当,有一定的技术水平;本作品结论适合在我国欠发达地区种植规模较小,外出务工较多的农村,为提高其规模化和产业化水平,有较好推广前景。

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。
作品简介: 利用超音速火焰喷涂得到的WC涂层具有优良的耐磨性,已被广泛应用于航空航天领域。但是目前国内使用的WC-Co喷涂粉末基本都是进口粉末,维修成本非常高。现在国内已经能够自主生产WC-Co粉末,但其作为新研材料,必须经过测试,而国内对此研究较少。本文研究了该粉末的显微组织、空隙率、结合强度等性能,对国产WC-Co粉末的推广应用,降低飞机维修成本具有重要的意义。

作品简介: 机械装备通常投入运行后才可以实际操作。使用实物、模型、视频、PPT讲解等培训方式都难以进行操控培训。 本作品中建立了机械装备仿真运行环境,通过仿真操作面板,实现了虚拟样机的可操控性、现场运行仿真性和机械装备内部可见性,针对机械装备结构、操作、安全、维护等各方面内容进行培训指导,解决了企业岗前培训、生产培训等方面的困难,其核心技术已应用于隧道股份公司的盾构机虚拟培训系统中,达到预期效果。

作品简介: 伴随食品、医药、电子等轻工业的快速发展,对于后包装生产线的机械自动化及卫生安全等方面提出越来越高的要求。本项目结合实际需求,通过分析工作时所需抓放动作,创新设计出能够实现空间三个方向平动和一个转动自由度的3T1R四自由度高速并联机械手,以便实现空间移位和摆放在一道工序内实现。经分析预测,该机械手可以达到10-15g的加速度,实现抓取次数达100-120次/min。

作品简介: 本作品依据机械设计、流体力学等知识,综合仿生学,设计制造一种仿鱼机器人,模仿鲤鱼的游动;在游动成功的基础上,给机器鱼加装摄像头和复杂控制系统以及无线传输模块等,实现机械鱼的自主游动、遥控游动和水下监测等功能。后期还可根据不同任务的需要更换或继续加装其他设备。

作品简介: 履带式排爆机械人主要由底座和手臂组成; 底座:用铝合金作为支架连接双排可折叠式履带,由两大齿轮加三小齿轮带动,通过齿轮和履带间的传动驱使机械人移动,用履带代替传统的轮传动;履带前端的接近角可以达到60度,加上履带的优势,所以具有很强的攀爬能力。 手臂:由前、中、后三部分构成,前臂仿液压式的螺旋传动,可达到360度旋转,中臂和后臂之间旋转角90--180度;手臂总长约160cm,安装在底座上

作品简介: 本机械手模型采用混合驱动,综合电机传动精度高及气压传动快的优势。六关节机械体可完成机身回转、手臂伸缩和俯仰、手腕升降和旋转5个自由度,以不同位姿实现对目标物体的抓取。基于激光调制技术的寻迹系统可搜寻、定位目标物体及距离检测。本机械手可实现各关节的点动,定点间单/双层物体和横/斜位姿物体的搬运、高低位置放置、单次/循环激光定位等自动控制,利用自行开发的监控软件进行数据采集、实时动画模拟等。
作品简介: 本设计分别制作了控制机械臂和建立在智能车平台上的仿生机械臂。控制机械臂与智能车间使用无线通信。通过无线控制的方式来操控机械臂的动作、实现机械臂的运动。
