












搜索

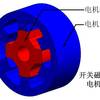
作品简介: 该机器人针对核泄露事故代替救援人员进入现场实施救援工作。 该机器人采用履带式结构,具备三关节六自由度机械手臂。配备有核探测仪,可以得到核污染区辐射分布情况,也可以利用其机械手臂处理核污染废物。
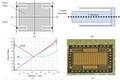
作品简介: 本项目研究的目标就是实现陀螺仪的产品化、生产化。本项目采用的陀螺仪相比于传统的陀螺仪有显著的优势和特点,传统的陀螺仪多采用静电驱动电容检测,电容式的陀螺仪缺点是显而易见的,如驱动力小、检测电路复杂、衬底必须可导电等。而本项目所设计的陀螺仪完全把这些缺点转化成了优点,而且首次实现了电子器件RTD和陀螺仪的结合,为制作高灵敏度陀螺仪开创了先河和指引方向,也为现实我国自主开发研制可实用性陀螺仪打下基础。
